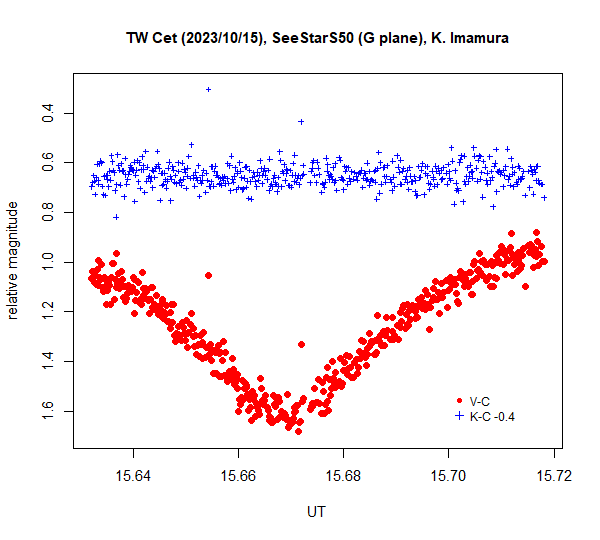
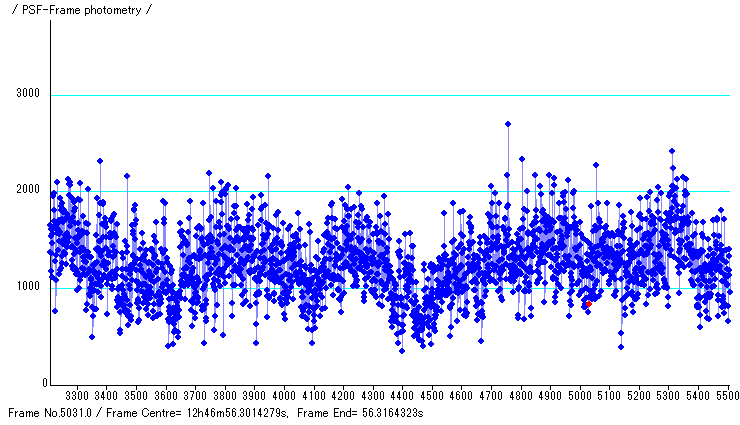
ちなみに、TW Cet という星は EW 型の食変光星で、軌道周期は約7.6時間。変光幅は約10.4等~約11.2等となる。その他、詳細は AAVSO の VSX をご覧頂ければと思う。なお光度曲線化は、エクセルでも gnuplot でもなんでも良いのだが、院生時代に自作した R コードを久々に走らせた。
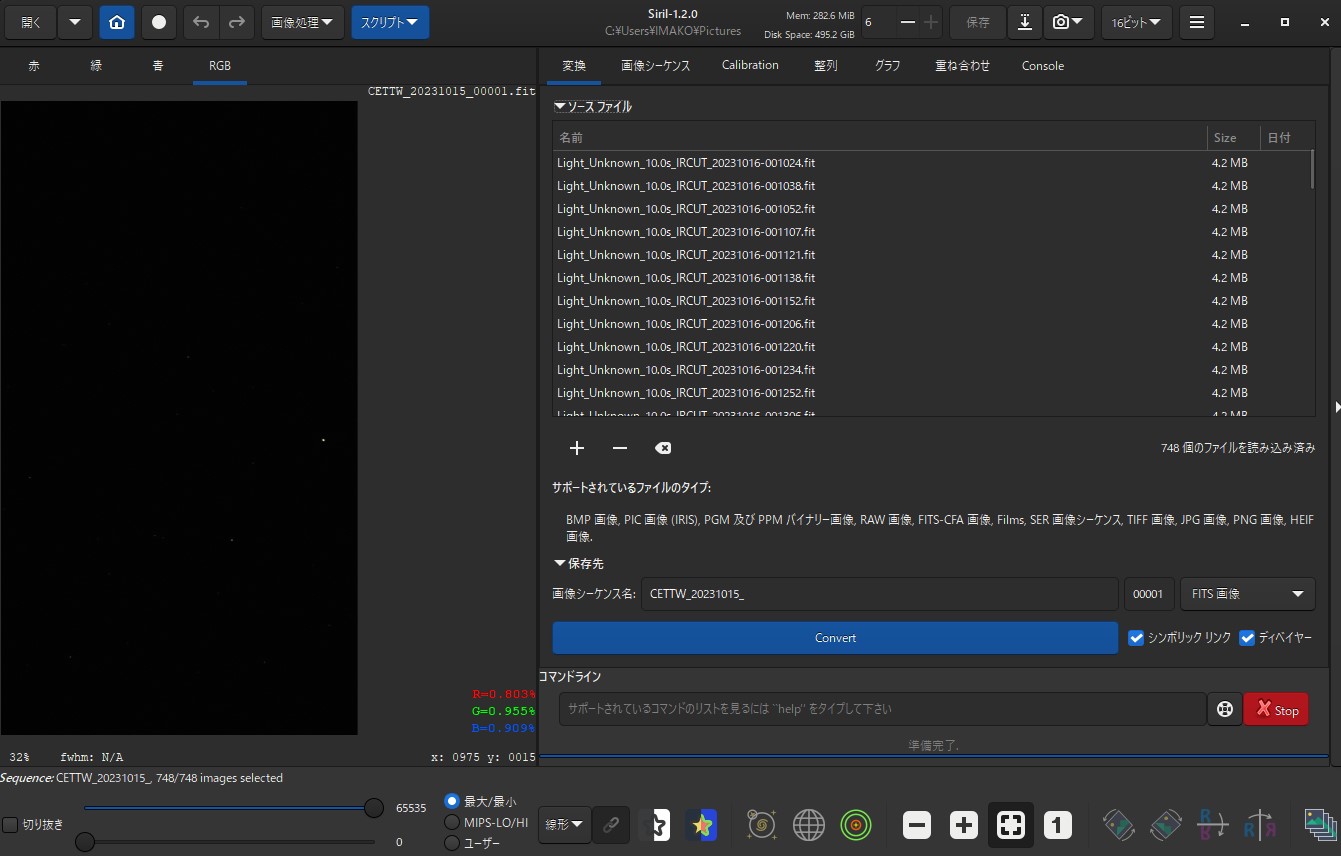
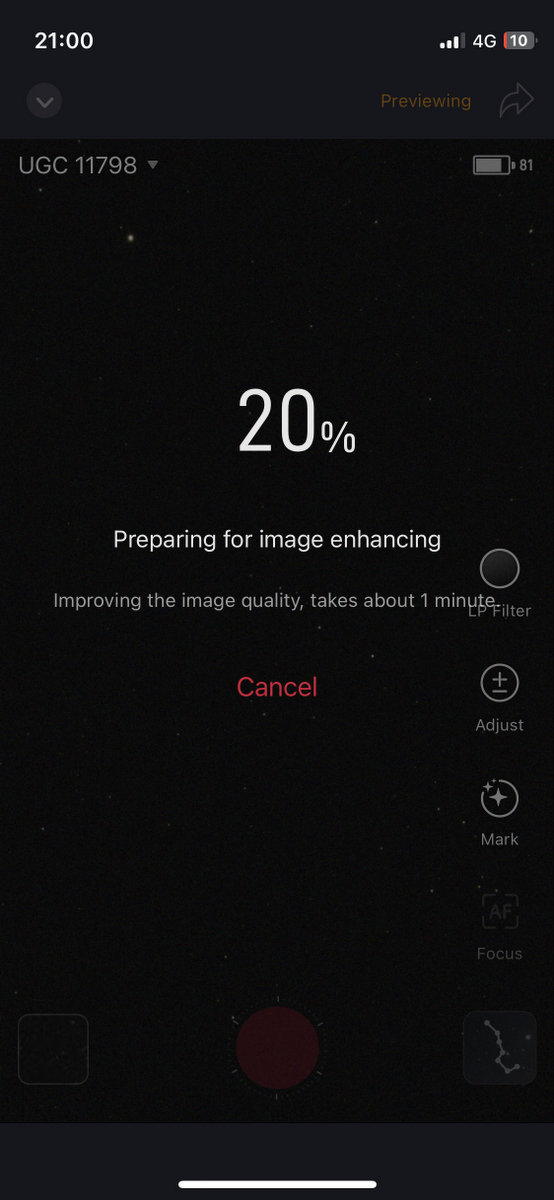
さて、まずはFITSデータのヘッダー部を見に行ってみたところ、以下のように記録されていた (このときアプリの Ver. 1.6.0)。測光する上で気になるパラメータはBITPIX、DATE-OBS、GAIN、EXPTIMEあたりだろうか。まず16ビットで記録されているようなのだが、チップは12ビットだった気がするのですが、なぜでしょう?あと、記録上GAIN は0らしいです。露出時間(EXPTIME)については10秒となっており、STACKCNTでスタック枚数を確認することもできる(下記の場合17枚スタック)。それから、DATE-OBS ですが、これは確認すると、ファイルを書き込む時間であり、露出開始時刻でも露出中央時刻でもない。あと撮影領域の(恐らく画像中央部の)RA, DEC がきちんと記録されていた。
SIMPLE = T / file does conform to FITS standard
BITPIX = 16 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 1080 / length of data axis 1
NAXIS2 = 1920 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
BZERO = 32768 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
CREATOR = 'ZWO SeestarS50' / Capture software
XORGSUBF= 0 / Subframe X position in binned pixels
YORGSUBF= 0 / Subframe Y position in binned pixels
FOCALLEN= 250 / Focal length of telescope in mm
XBINNING= 1 / Camera X Bin
YBINNING= 1 / Camera Y Bin
CCDXBIN = 1 / Camera X Bin
CCDYBIN = 1 / Camera Y Bin
XPIXSZ = 2.90000009536743 / pixel size in microns (with binning)
YPIXSZ = 2.90000009536743 / pixel size in microns (with binning)
IMAGETYP= 'Light ' / Type of image
STACKCNT= 17 / Stack frames
EXPOSURE= 10. / Exposure time in seconds
EXPTIME = 10. / Exposure time in seconds
CCD-TEMP= 31.375 / sensor temperature in C
RA = 325.94166 / Object Right Ascension in degrees
DEC = 58.910556 / Object Declination in degrees
DATE-OBS= '2023-09-07T13:29:18.968887' / Image created time
FILTER = 'IRCUT ' / Filter used when taking image
INSTRUME= 'ZWO ASI462MC' / Camera model
BAYERPAT= 'GRBG ' / Bayer pattern
GAIN = 0 / Gain Value
FOCUSPOS= 1723 / Focuser position in steps
CTYPE1 = 'RA---TAN-SIP' / TAN (gnomic) projection + SIP distortions
CTYPE2 = 'DEC--TAN-SIP' / TAN (gnomic) projection + SIP distortions
CRVAL1 = 325.864657001 / RA of reference point
CRVAL2 = 58.4367581555 / DEC of reference point
CRPIX1 = 620.462905884 / X reference pixel
CRPIX2 = 424.348834991 / Y reference pixel
CD1_1 = 0.000653455368759 / Transformation matrix
CD1_2 = 8.05007464939E-05 / no comment
CD2_1 = -8.05028320475E-05 / no comment
CD2_2 = 0.000653512893025 / no comment
A_ORDER = 2 / Polynomial order, axis 1
B_ORDER = 2 / Polynomial order, axis 2
AP_ORDER= 2 / Inv polynomial order, axis 1
BP_ORDER= 2 / Inv polynomial order, axis 2
A_0_0 = 0 / no comment
A_0_1 = 0 / no comment
A_0_2 = -8.30492838653E-08 / no comment
A_1_0 = 0 / no comment
A_1_1 = 2.8993066821E-07 / no comment
A_2_0 = -1.56753469845E-07 / no comment
B_0_0 = 0 / no comment
B_0_1 = 0 / no comment
B_0_2 = 9.10789361412E-09 / no comment
B_1_0 = 0 / no comment
B_1_1 = 1.11958634748E-07 / no comment
B_2_0 = -2.18285922543E-07 / no comment
AP_0_0 = 7.79688085006E-06 / no comment
AP_0_1 = 8.44448105368E-09 / no comment
AP_0_2 = 8.30006016543E-08 / no comment
AP_1_0 = -4.3014317931E-09 / no comment
AP_1_1 = -2.89818945813E-07 / no comment
AP_2_0 = 1.5672062992E-07 / no comment
BP_0_0 = 9.43750745103E-06 / no comment
BP_0_1 = -4.5521709248E-09 / no comment
BP_0_2 = -9.12833091452E-09 / no comment
BP_1_0 = -1.35940894416E-09 / no comment
BP_1_1 = -1.11859946114E-07 / no comment
BP_2_0 = 2.18202657047E-07 / no comment
IMAGEW = 1080 / Image width, in pixels.
IMAGEH = 1920 / Image height, in pixels.
ちなみに、ざっくりと他社のドイツ式赤道儀について、搭載重量が似たようなものを本体重量と併せて比較してみると、以下の表のようになる。私は EQ6R pro を持っているので、25cm 級 (10kg超え) の鏡筒の運用には困っていないが、この赤道儀は本体重量が 17kg あり、その重量ゆえ普段は自宅のピラー脚にほぼ固定した状態にしている。もちろん、遠征に出かける場合は、ピラー脚からエイヤっと取り外し、半自作のケースに入れて車に積んでいた。
赤道儀名
本体重量 kg
搭載重量 kg
ZWO AM5
5
13 (20)
SkyWatcher EQ6R pro
17
20
タカハシ EM-200
16.5
16
SkyWatcher AZ-EQ5GT
7.7
15
iOptron iEQ30 pro
6.8
13
iOptron CEM40
7.2
18
※AM5 の括弧内の搭載重量はカウンターウェイト有りの場合.
本体重量・搭載重量&と比較しても、AM5 は本体重量のわりに、搭載重量にかなり余裕がある。しかもどの赤道儀よりもコンパクトである。さらにカウンターウェイトを装着すれば、EQ6R pro と同じ20 kg まで搭載でき、コンパクトボディからは想像がつかないスペックである。このスペックの裏側には波動歯車装置 (ハーモニックドライブ) なる技術があるようで、気になる方はまず天リフさんのサイト(『ハーモニックドライブと赤道儀』)をご覧になると良いだろう。
AM5 には極軸望遠鏡がない。しかし、今流行りのZWO社 ASI Air という機器を用いれば、スマホ or タブレット用のアプリケーションに実装されている Polar Align 機能を使って極軸を追い込むことができる(参考: getaのブログ 『南の空で極軸合わせ(All-Sky Polar Align)してみました』)。この機能の使用感については、その他、天リフさんのレビュー動画もわかりやすい。皆さんのレビューの通り、この手法は北極星が見えない場所でも行うことができる。
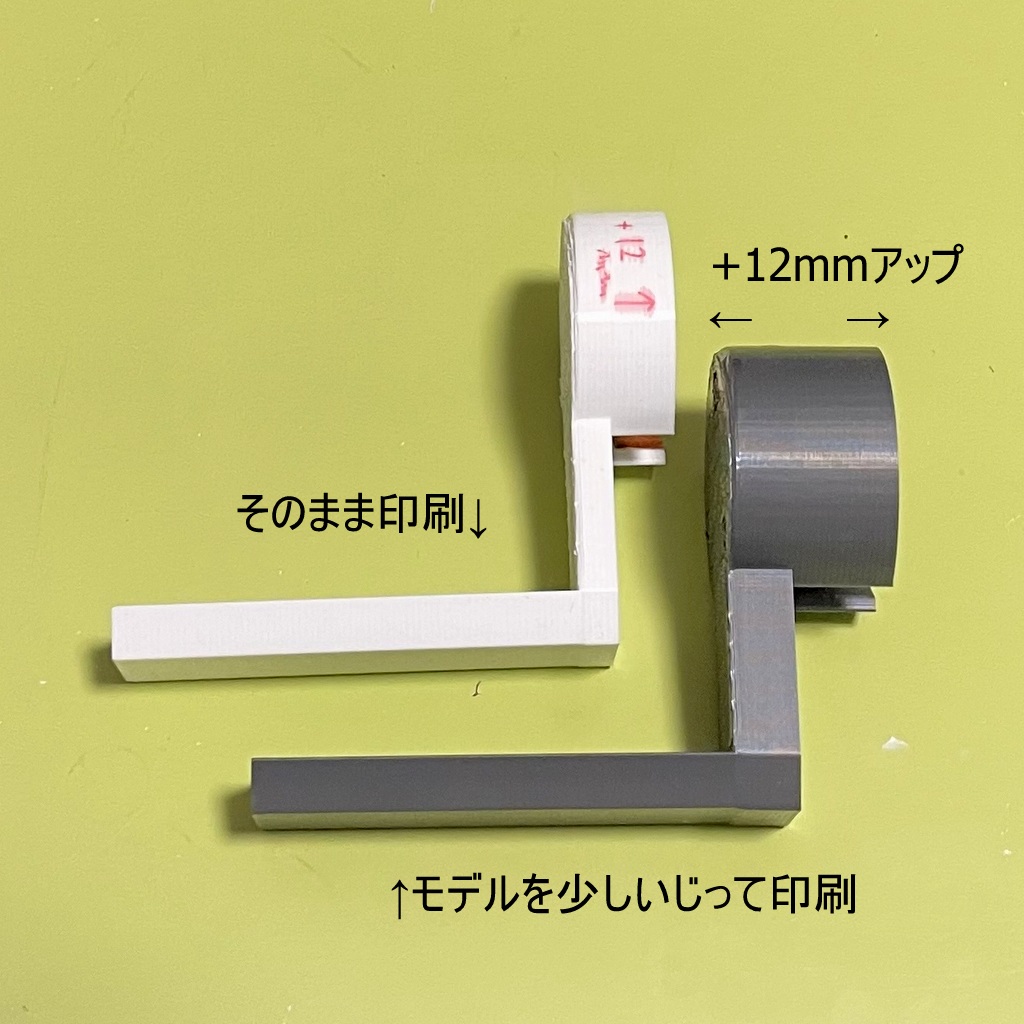
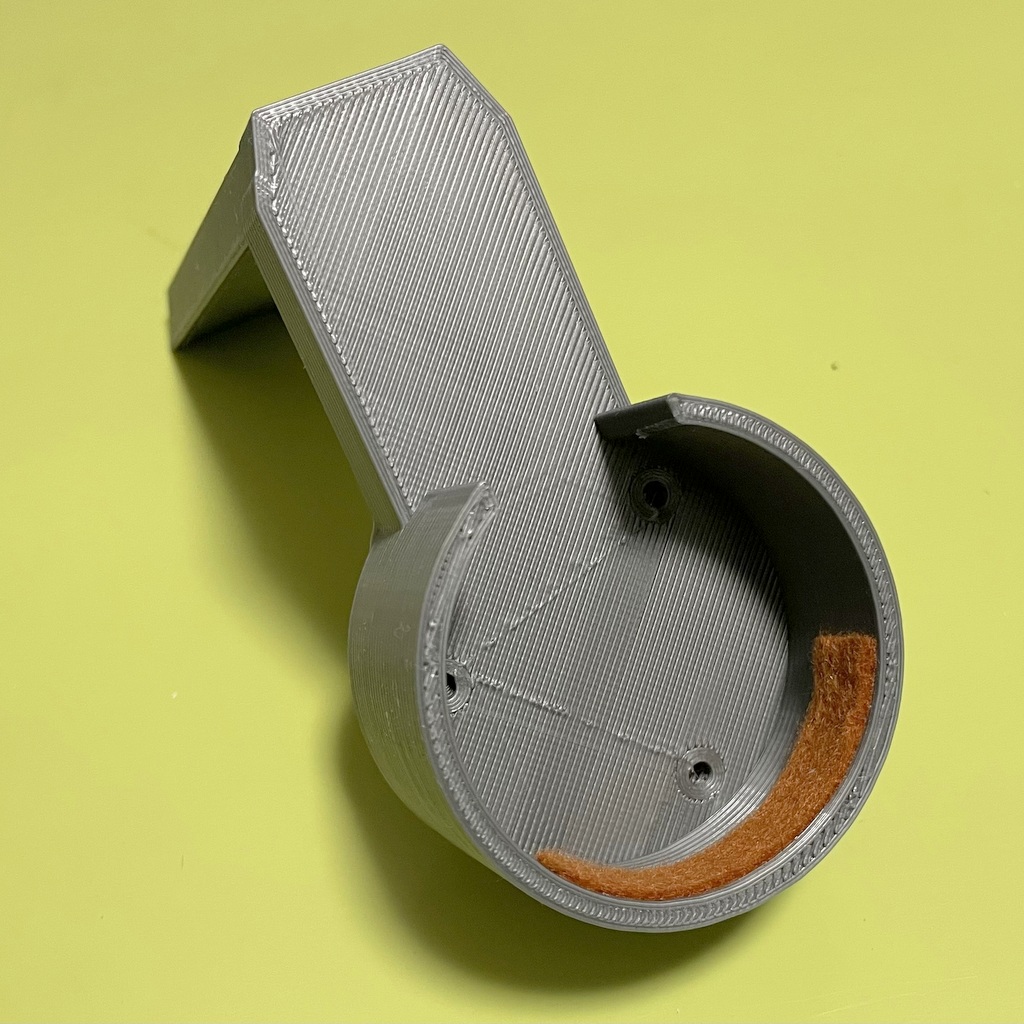
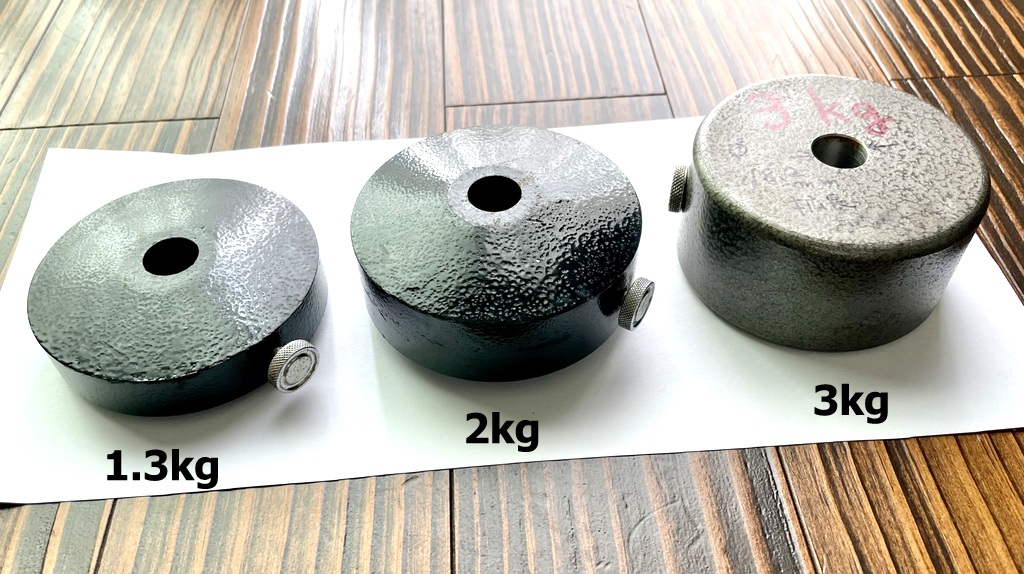
ちなみに私の場合 AM5 導入前から、 ASI Air plus と PoleMaster は両方持っている。PoleMaster 用に追加の投資をしないのであれば、ASI Air で極軸を追い込めば良いのだが… 海外の事例も調べていくと、PoleMaster を AM5 に装着するための 3D プリント用のデータを発見してしまったのである。
AM5 に限らず、ASI Air (plus) とガイド鏡の取り付けは、使用する鏡筒や周辺パーツで様々なパターンがあるだろう。それゆえ、取り付け方法は色々悩む部分でもある。そもそも、AM5 本体にはビクセン規格のファインダーシューを取り付けられる部分が2ヶ所ある。デフォルトでは本体側面にファインダー用のアリミゾが固定されている。しかし、星見屋さんのホームページにある通り、ここに ASI Air を取り付けると、運用時に干渉するらしく、この部分への取り付けは、ユーザーの間でも推奨されていないと思われる。そのため、ASI Air の取り付け位置は、鏡筒用のアリミゾの側面が推奨されている (詳しくは先の星見屋さんのホームページ参照)。
MEADE 25.4cm にファインダーシューを取り付け、ASI Air plus を装着している様子.
さらに ASI Air plus の底面にファインダーシューを取り付け、ORION 社のガイド鏡を装着.
最初は、星見屋さんの言う通り、 AM5 のアリミゾ側面に ASI Air を取り付けても良い気がしていたのだが、使う鏡筒によっては、ASI Air からカメラやガイド鏡までの距離が生じる。そして、何本ものケーブルが赤経・赤緯の駆動部分周辺に集まると、絡まって断線しないか心配になる(センスのある人は、うまく束ねて配線するのだろうけど)。そこで私の場合(上の写真のように)、ASI Air はなるべく鏡筒部分におんぶさせ、カメラやガイド鏡の近くに設置するようなスタイルにした。まぁ、この方法でも、運用時はケーブルをある程度整理しておかないといけないのは変わらないが… (^^;
ちなみに、MEADE 25.4 cm のファインダーは、所謂ビクセン規格のアリミゾではない。そのため、私は追加でガイド鏡を載せるための、ファインダーシューを鏡筒に取り付けている。ASI Air plus はその追加のシューに装着し、(写真のように)さらに ASI Air plus の底面にもファインダーシューを追加し、ガイド鏡を装着している。ガイド鏡も含めると、トリッキーな装着方法なので、変なチカラがかかって、ASI Air plus がモゲないか心配ではあるが、オートガイド撮影中、特に問題は感じなかった。しかし、同じようなことをニュートン式 (SkyWatcher BKP130) でもやってみたところ、オートガイドは問題無くできるがのだが、何ともアンバランスな感じだったので、別な取り付け方法をしばらく思案することにした。
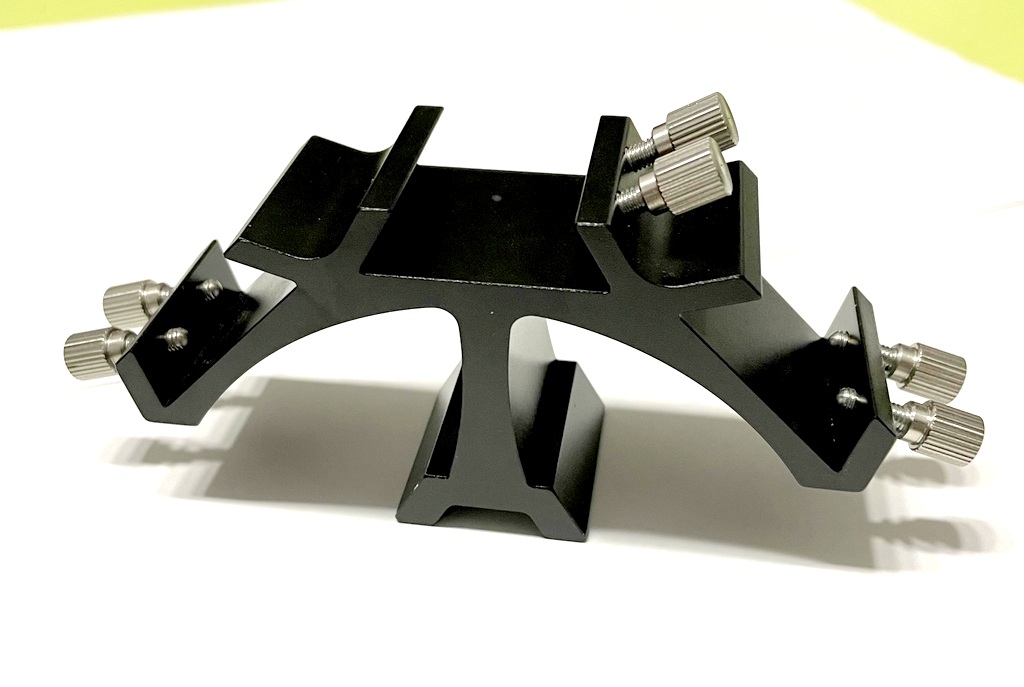
そこで発見したのが、こちら。アマゾンで見つけた謎の3連アリミゾのファインダー台座である。しかもお値段約1700円。これは使えば、ASI Air plus に無理をさせずに、ガイド鏡とセットで搭載することができる。なお BKP130 への装着については、既存のファインダーシューにはセットせず、鏡筒バンドにアルミの切り板で橋げたを作り、そこに3連アリミゾを取り付け、ASI Air plus とガイド鏡を載せるようにした。
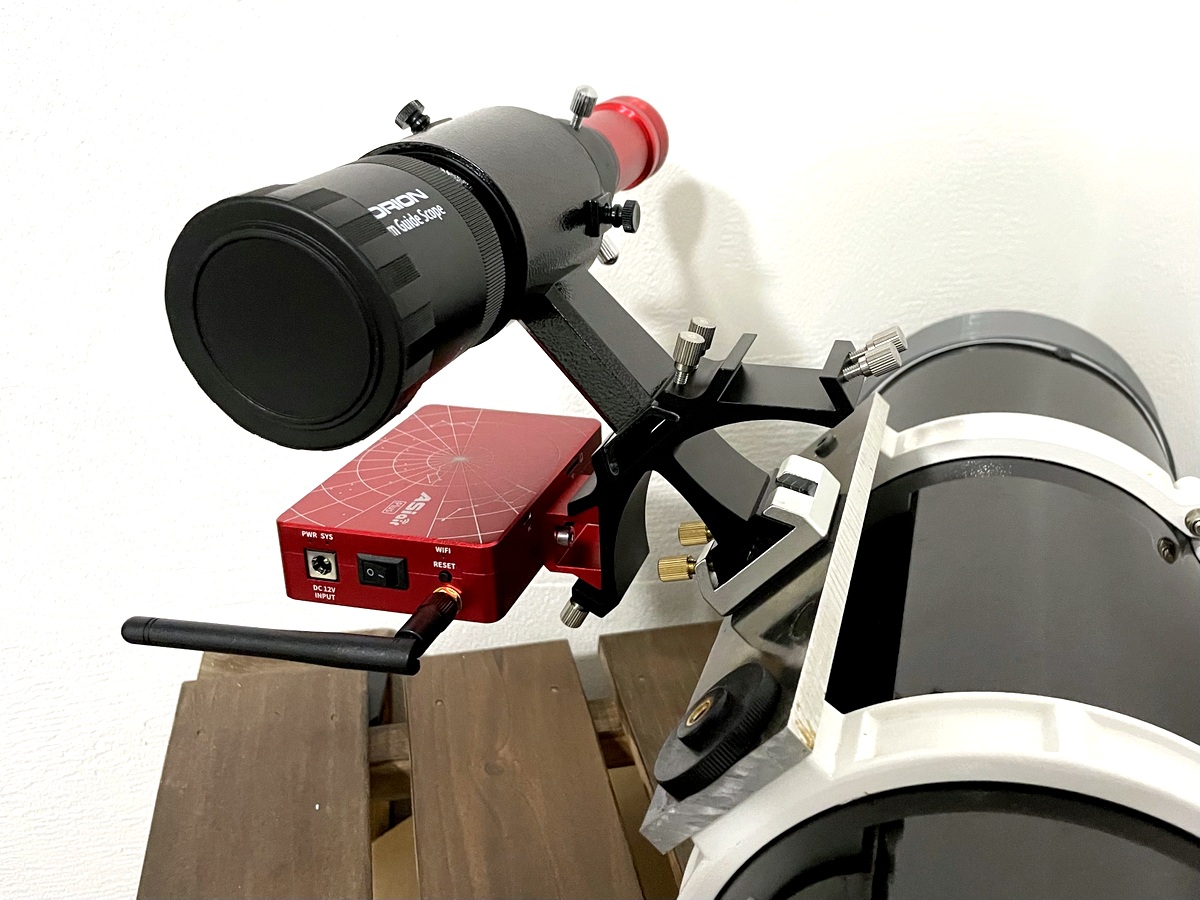
BKP130 に3連アリミゾ台座を装着し、ASI Air plus とガイド鏡を載せた様子.
鏡筒バンドにアルミの切り板を橋渡し(自作)し、そこに一つファインダーシューを設けた.
はたして、これがスマートな載せ方か?と問われれば、答えは人それぞれだろう。少なくとも、ASI Air plus 本体にガイド鏡をさらにおんぶさせるよりかはマシかなと思っている次第。BKP130 の場合、既存のファインダーシューに載せても良かったのだが、鏡筒全体の重量バランスを考えれば、鏡筒の中央部に載せるほうがバランスがとりやすいと思う。あと眼視用のファインダーは載っていると、何かと便利なこともあるので、既存のファインダーシューを潰さないのは、自分的には吉である。なお現在は、MEADE 25.4cm を運用する場合にも、この3連アリミゾを鏡筒に載せ、そこに ASI Air plus とガイド鏡を取り付けて撮影している。
さいごに
個人的な感想だが、今のところAM5はサイコーの相棒になってくれそうである。軽量・コンパクトにも関わらず、搭載重量が大きいため、遠征時には本当に重宝する。その一方で、ASI Air での運用に手を出すと、機材がどんどん ZWO 縛りになってくるが、そのぶん撮影効率がアップするので、投資する価値はあると思う。冒頭でも述べた通り、今後本機は主にお仕事用で、遠征を伴う資料撮影で活躍させていく予定だ(プラス、移動が必要な恒星食の観測などでも)。最後になったが、1枚だけ AM5 で撮った作例を以下に示し、この記事を締めくくりたい。
三裂星雲 M20. 2023年5月16日撮影. Meade 25cm (F6.3) + AM5 + ASI294MC-pro (+ ASI Air plus + ASI120MM-mini), コマコレ無し. 120sec × 85 (加算平均), Gain 120, Bin 1, 冷却-10度, ダーク&フラット補正済, トリミングあり. ステライメージ9 -> Photoshop -> PixInsight (BXT)
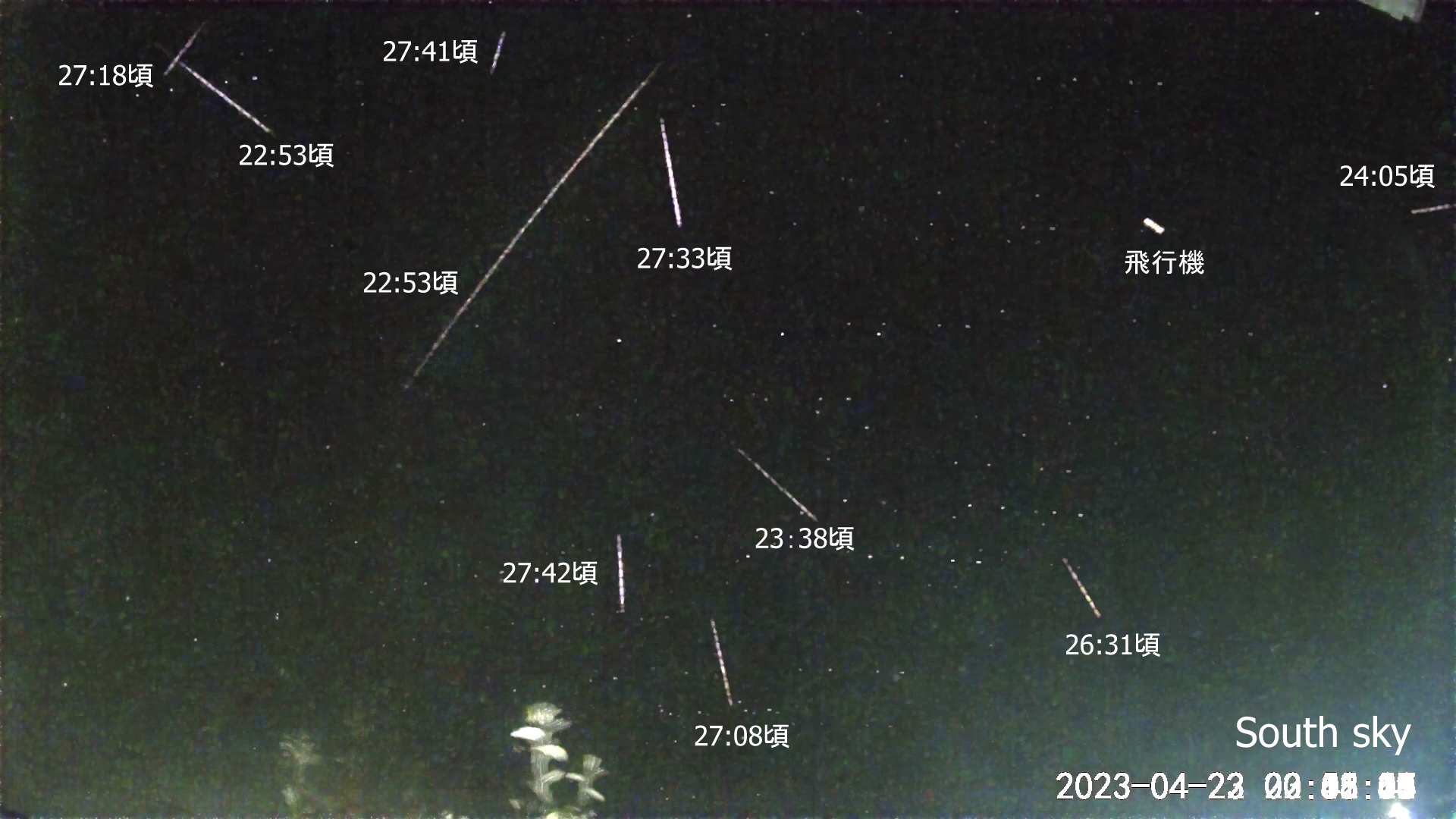
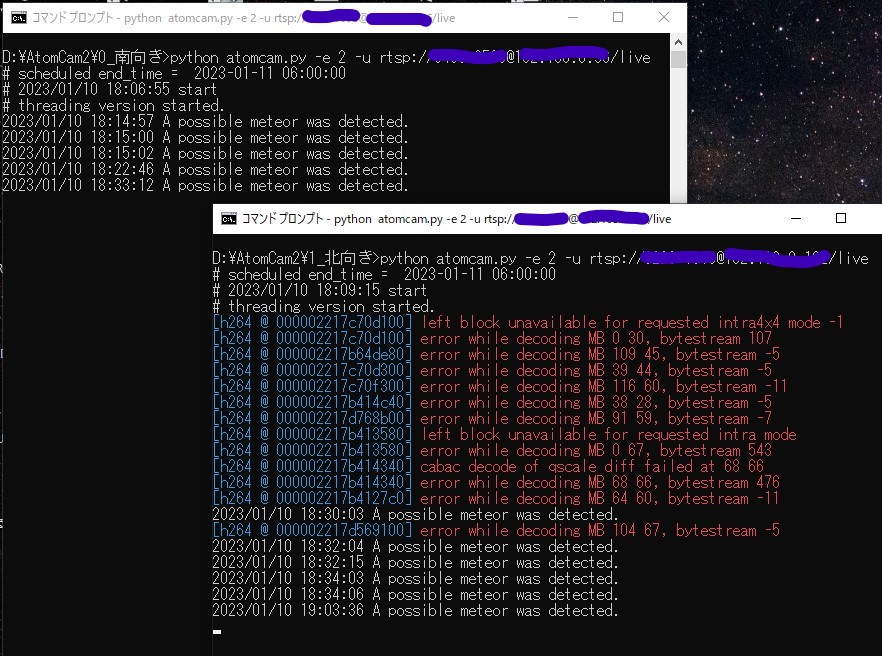
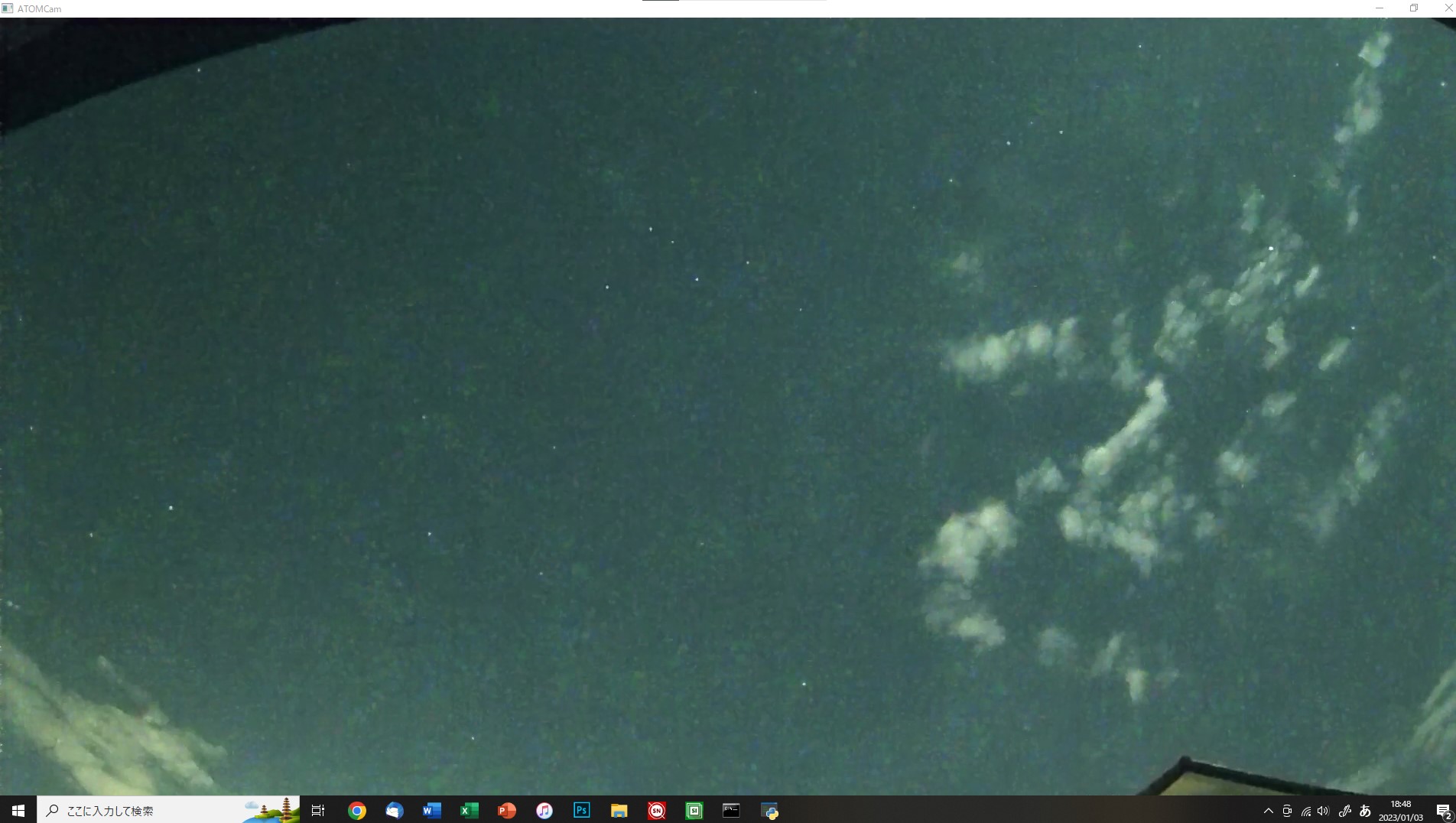
meteor-detect (製作者: 長谷川均氏/東京) を使ったリアルタイム検出を動かすことできるようになったので、現在運用中の2台の Atom Cam2 について、1台の PC で同時にリアルタイム検出が可能か、テストしてみました。先に結論を述べると、とりあえず2台分、リアルタイム検出が動いてました。
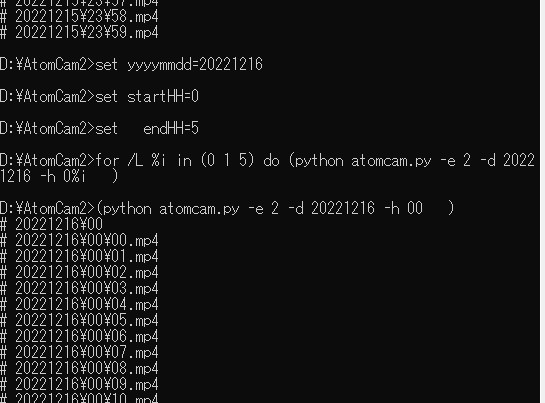
しかし!期待しないでください(え、そもそも需要無い? ^^;)。私は3流のナンチャッテ R 使いなので、中身はとってもショボイです。でも一応、1日おきのデータに対して自動ループ処理ができたし、目的は達せています。公開するのも恥ずかしいレベルですが、少しでも誰かの役に立てば幸いです。
set yyyymmdd=20221215
set startHH=18
set endHH=23
for /l %%i in (%startHH%, 1, %endHH%) do (
python atomcam.py -e 2 -d %yyyymmdd% -h %%i
)
set yyyymmdd=20221216
set startHH=0
set endHH=5
for /l %%i in (%startHH%, 1, %endHH%) do (
python atomcam.py -e 2 -d %yyyymmdd% -h 0%%i
)