
はじめに
このたび、星見屋さんの依頼を受け、日本変光星研究会の所属として、ZWO社のSeeStar S50 を使った変光星の測光観測について検証を行うことになった (2023年9月上旬より)。デモ機を星見屋さんから送って頂き、それを検証機として用いている(なお検証に伴う報酬は一切受け取らない)。



本記事は検証結果を備忘録的に書いていることを先に断っておく(※2023年10月時点の内容なので、アプリのアップデートにより機能等が変わっていることもあるので注意されたし)。予備知識として変光星の測光観測(CCD又はデジカメ測光)をしたことがないと、よくわからないことが多いと思われる。今後、測光結果が VSOLJ に報告しても良さそうであれば、将来的には SeeStar S50 を使ったビギナー向けの変光星観測のマニュアルを作る予定である。
SeeStar S50 の基本的なレビュー(操作感や撮像等)については、他のレビュワーにまかせるが(天文ガイド11月号にもレビュー記事がありますね)、測光にも関わってきそうな機器の基本スペックについては以下に示しておく。
| 口径 | 5cm |
| 口径比 | F4.9 |
| 焦点距離 | 246mm |
| イメージセンサー | IMX462 (カラーCMOS) |
| センサーサイズ | 1/2.8″ |
| 解像度 | 1080×1920 |
| ピクセルサイズ | 2.9×2.9μm |
| A/Dコンバーター | 12bit |
| 画角 | 約0.7°×1.3°(縦長に撮影される) ※1ピクセルあたり約2.4秒角 |
| 架台 | 経緯台式 |
| 制御 | スマホアプリ (Seestar) より |
FITSデータについて
SeeStar の画像データはスマホで操作していると、スマホ内に画像データがとりこまれるが、これは JPEG 形式である。測光に必要なRAWデータは、FITS形式で機器内部のストレージに保存されている。FITS データを取り出すさいは、付属のUSBケーブルを使ってPCに繋ぐと SeeStar を外部ストレージとしてPCが認識するので、FITSデータを抜き出すことができる。
SeeStar は10秒露光で撮影したデータをどんどんライブスタックして、S/Nを向上させながら撮影するスタイルの機器だ(用途は電視観望が主たる目的)。そのため、現状保存されるデータはRAW形式 (FITS) であっても、スタック後のデータが基本となる(アプリのバージョンアップに伴い、Ver. 1.8 でスタック前の画像が保存できるオプションが追加されたらしい)。ちなみに、現在のアプリの仕様では、露出時間は10秒で固定されており、変更することはできない (※その後、アプリのアップデートに伴い、20秒、30秒が選択できるようになった)。
さて、まずはFITSデータのヘッダー部を見に行ってみたところ、以下のように記録されていた (このときアプリの Ver. 1.6.0)。測光する上で気になるパラメータはBITPIX、DATE-OBS、GAIN、EXPTIMEあたりだろうか。まず16ビットで記録されているようなのだが、チップは12ビットだった気がするのですが、なぜでしょう?あと、記録上GAIN は0らしいです。露出時間(EXPTIME)については10秒となっており、STACKCNTでスタック枚数を確認することもできる(下記の場合17枚スタック)。それから、DATE-OBS ですが、これは確認すると、ファイルを書き込む時間であり、露出開始時刻でも露出中央時刻でもない。あと撮影領域の(恐らく画像中央部の)RA, DEC がきちんと記録されていた。
SIMPLE = T / file does conform to FITS standard
BITPIX = 16 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 1080 / length of data axis 1
NAXIS2 = 1920 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
BZERO = 32768 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
CREATOR = 'ZWO SeestarS50' / Capture software
XORGSUBF= 0 / Subframe X position in binned pixels
YORGSUBF= 0 / Subframe Y position in binned pixels
FOCALLEN= 250 / Focal length of telescope in mm
XBINNING= 1 / Camera X Bin
YBINNING= 1 / Camera Y Bin
CCDXBIN = 1 / Camera X Bin
CCDYBIN = 1 / Camera Y Bin
XPIXSZ = 2.90000009536743 / pixel size in microns (with binning)
YPIXSZ = 2.90000009536743 / pixel size in microns (with binning)
IMAGETYP= 'Light ' / Type of image
STACKCNT= 17 / Stack frames
EXPOSURE= 10. / Exposure time in seconds
EXPTIME = 10. / Exposure time in seconds
CCD-TEMP= 31.375 / sensor temperature in C
RA = 325.94166 / Object Right Ascension in degrees
DEC = 58.910556 / Object Declination in degrees
DATE-OBS= '2023-09-07T13:29:18.968887' / Image created time
FILTER = 'IRCUT ' / Filter used when taking image
INSTRUME= 'ZWO ASI462MC' / Camera model
BAYERPAT= 'GRBG ' / Bayer pattern
GAIN = 0 / Gain Value
FOCUSPOS= 1723 / Focuser position in steps
CTYPE1 = 'RA---TAN-SIP' / TAN (gnomic) projection + SIP distortions
CTYPE2 = 'DEC--TAN-SIP' / TAN (gnomic) projection + SIP distortions
CRVAL1 = 325.864657001 / RA of reference point
CRVAL2 = 58.4367581555 / DEC of reference point
CRPIX1 = 620.462905884 / X reference pixel
CRPIX2 = 424.348834991 / Y reference pixel
CD1_1 = 0.000653455368759 / Transformation matrix
CD1_2 = 8.05007464939E-05 / no comment
CD2_1 = -8.05028320475E-05 / no comment
CD2_2 = 0.000653512893025 / no comment
A_ORDER = 2 / Polynomial order, axis 1
B_ORDER = 2 / Polynomial order, axis 2
AP_ORDER= 2 / Inv polynomial order, axis 1
BP_ORDER= 2 / Inv polynomial order, axis 2
A_0_0 = 0 / no comment
A_0_1 = 0 / no comment
A_0_2 = -8.30492838653E-08 / no comment
A_1_0 = 0 / no comment
A_1_1 = 2.8993066821E-07 / no comment
A_2_0 = -1.56753469845E-07 / no comment
B_0_0 = 0 / no comment
B_0_1 = 0 / no comment
B_0_2 = 9.10789361412E-09 / no comment
B_1_0 = 0 / no comment
B_1_1 = 1.11958634748E-07 / no comment
B_2_0 = -2.18285922543E-07 / no comment
AP_0_0 = 7.79688085006E-06 / no comment
AP_0_1 = 8.44448105368E-09 / no comment
AP_0_2 = 8.30006016543E-08 / no comment
AP_1_0 = -4.3014317931E-09 / no comment
AP_1_1 = -2.89818945813E-07 / no comment
AP_2_0 = 1.5672062992E-07 / no comment
BP_0_0 = 9.43750745103E-06 / no comment
BP_0_1 = -4.5521709248E-09 / no comment
BP_0_2 = -9.12833091452E-09 / no comment
BP_1_0 = -1.35940894416E-09 / no comment
BP_1_1 = -1.11859946114E-07 / no comment
BP_2_0 = 2.18202657047E-07 / no comment
IMAGEW = 1080 / Image width, in pixels.
IMAGEH = 1920 / Image height, in pixels.
何等まで写るのか?
先に示したFITSヘッダーの画像を以下に示す。これはテストで撮った μ Cep (ガーネットスター)で、スマホ内に保存されたJPEG画像となる(いわゆる撮ってだし)。画像は露出10秒で17枚スタックされている(総露出時間170秒)。ちょうど南中を過ぎたあたりで撮影したこともあり、画像の上がおおむね北になっている(ただし、撮って出しは上が南だったので、本記事の画像は180°回転をかけている)。

測光の検証をする前に、単純に画像の見た目だけで、何等まで写っているのか確認をしてみた。比較のさいは、カラー画像をマカリィで読み込み、R, G, B画像のうちG画像を用いている。星表 UCAC4 のV等級と比較したところ、SeeStar S50 (10秒×17) の画像から、16等台の星が写っていた。なお、観測地は自宅の庭で、新月期であれば夜空の明るさは約 20.3 mag/□” となる。
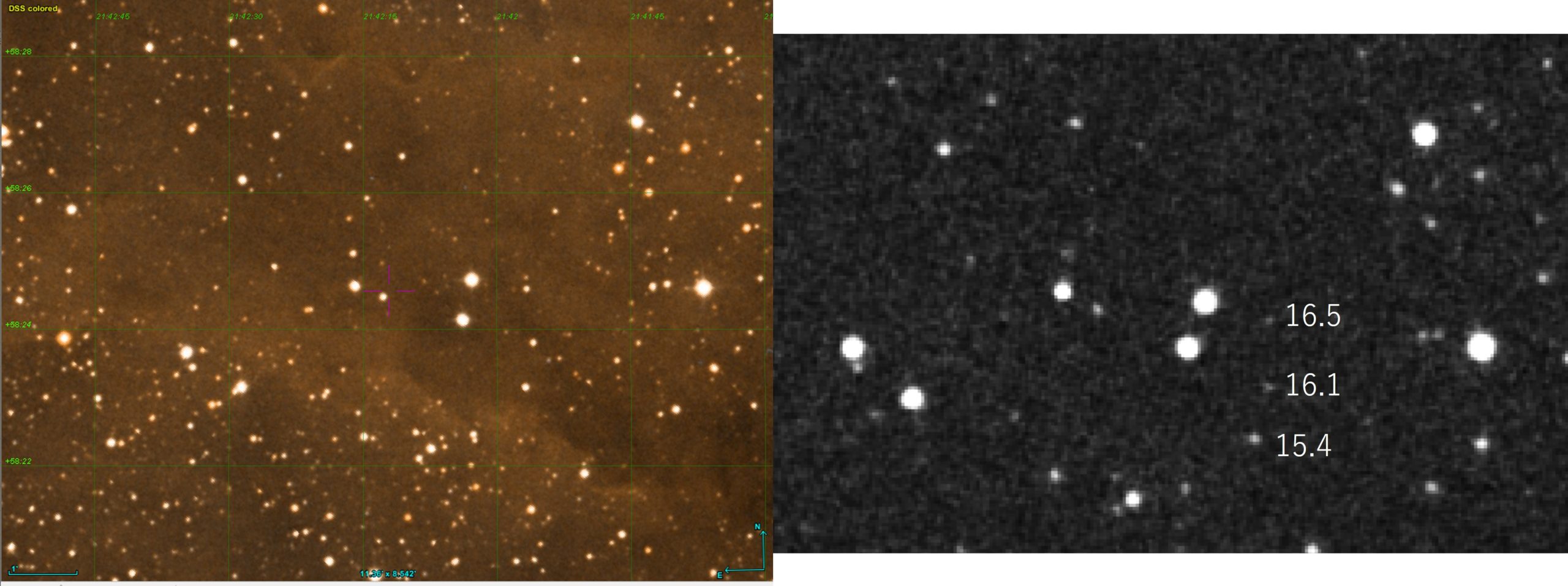
(【右】の写真はG画像, レベル補正あり)
16等台が写るということは、当然のことながら冥王星も写るだろうと思い記念撮影。以下のとおり、バッチリ写っていた (ステナビによれば14.4等らしい)。しかしながら、架台が経緯台なので、どれが冥王星なのか同定する場合は、比較する星図が地平座標になっていないと、ビギナーには難しいかもしれない(ステナビなどのソフトを持っていれば座標系をすぐ切り替えられるので問題ない?!)。変光星観測に用いる場合も、目的星の同定は撮像前の必須作業なので、経緯台の場合、星図との比較はある程度の慣れや工夫が必要といったところか。

とりあえず測光してみた
さて、長い前置きになったが、カラーCMOS画像は測光できるのか?そこでかつて、自分がデジカメ測光の検証でやったことを少し試してみることにした (げげっ!デジカメの検証ってもう13年も前のことなんだ・・・)。
まずはFITSデータ (先のμ Cep の画像) をマカリィで、G画像のみ読み込む。読み込んだG画像に対し、そのまま飽和していない星について、約30個測光してみた。そして、UCAC4 のV等級を参照し、横軸に器械等級、縦軸にV等級をとってグラフを描いてみると以下のようになった (当然、μ Cep は明るすぎて飽和している)。
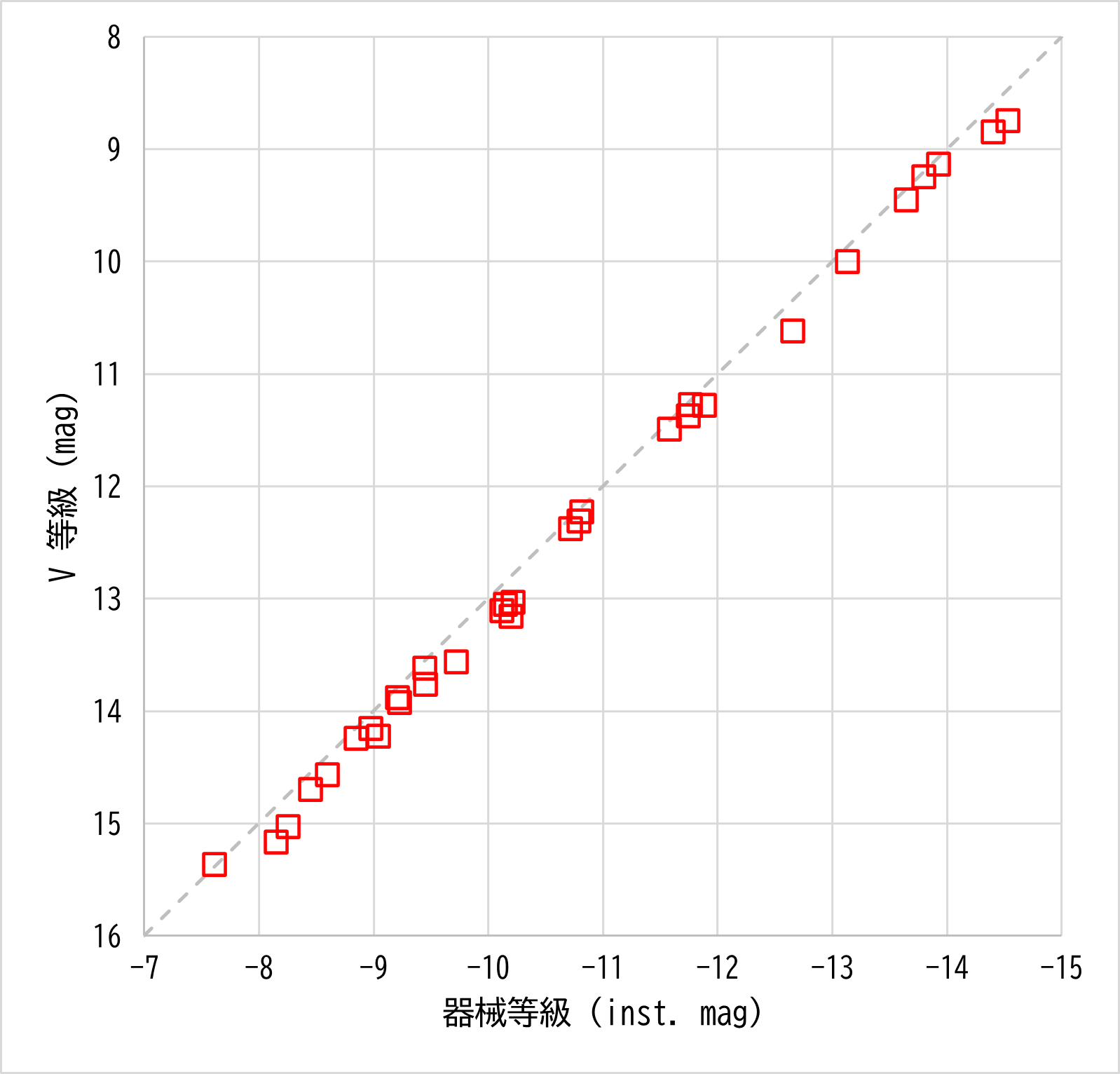
一応、デジカメと同じような感じで、線形性が確認できる。明るい星は8等くらいまで飽和していなさそうで、暗い星は15等くらいまでなら一応測れそうな感じだ。
ちなみに、飽和していた星のカウント値を見ると、6万5千カウントを超えていた。つまり、FITSのヘッダーにもあった通り、記録じたいは16ビットだということがわかる。しかし、例えば同型のチップを搭載した ZWO ASI462MC についても、12ビットだよ、と表記がなされている。これって本当は12ビットなのに、疑似的に16ビットで記録する「魔法」が使われているようなのだ。もし詳しい方がいれば、この「魔法」が何なのかご教授頂けると幸いである m(__)m
あと、SeeStar S50 に搭載されているCMOSチップ (IMX462 / ASI462MC) の分光感度特性、これは一応公開されている。グラフを見ると、G画像は 650nm から赤外に至るまで感度があるようだ。しかし、SeeStar S50 には星見屋さんの FAQ にもある通り、UV/IR カットフィルターが標準装備されている。ZWO で公開されているフィルターの透過域を信じるなら、700nm より長い波長域についてはカットされている。ではフィルターありの状態でR, G, B の分光感度特性がどうなっているのか、それは公開されてないし、多分誰も調べたことがなさそうなである。この点については、一度自分で回折格子でも使って測定してみる必要がありそうだ。
それから、測光のさい1次処理(ダーク&フラット)については、ダークのみ処理された状態になっている。SeeStar S50 は撮像をはじめるさい(以下のスクショのような表示が出て)、ここで必ず最初にダークを撮る動作が入るようになっているらしい。本機は内臓フィルターホイールにダーク用の遮蔽板が入っており、撮影時に自動で勝手にダークを撮って減算もしてくれるようなのだ。
SS Cyg のモニターと測光
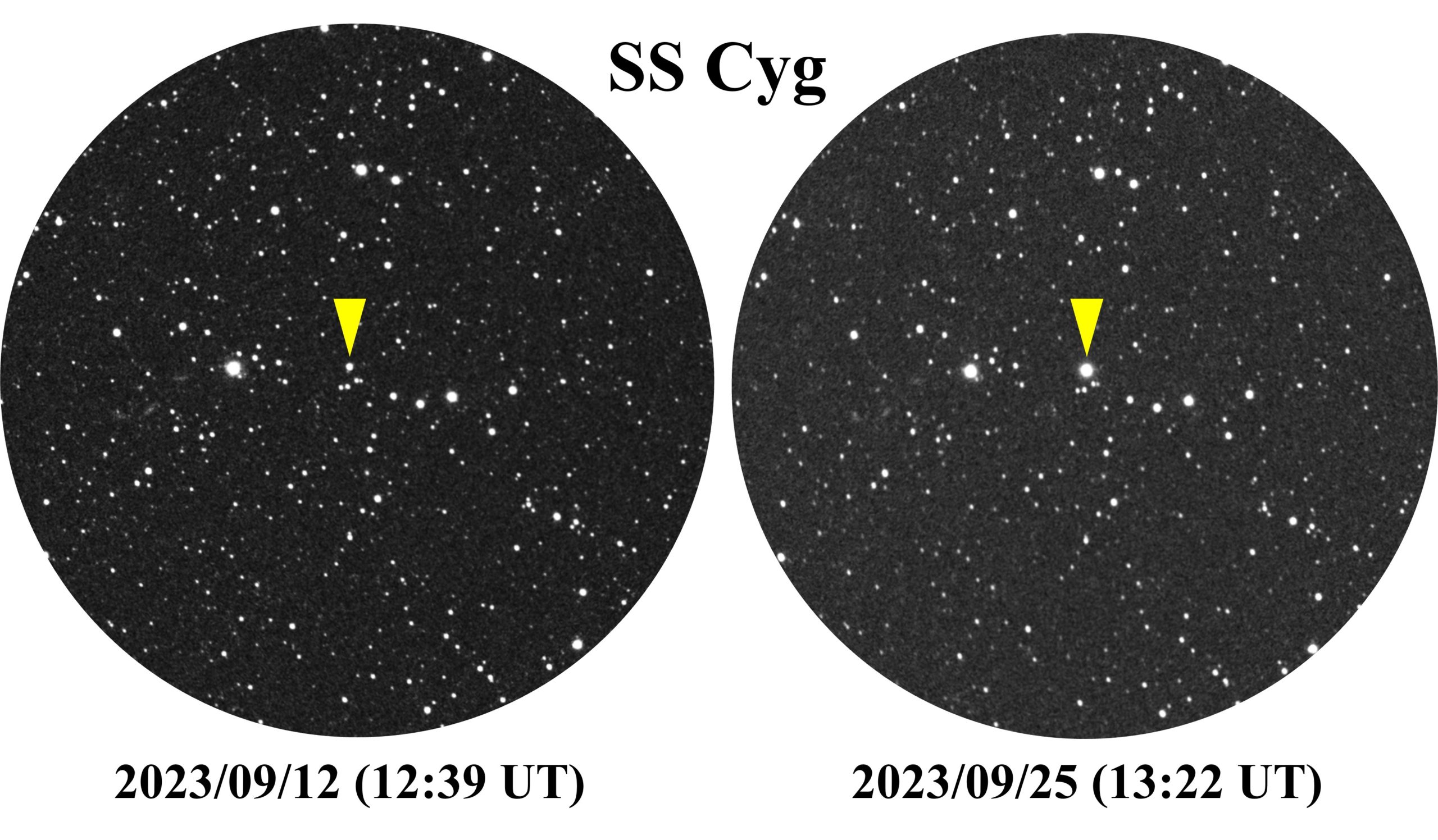
G画像については、とりあえず線形性も確認できたので、1日1点の観測ですむ変光星で測光のテストをしてみることにした。目的星は結果がわかりやすい矮新星の親分こと SS Cyg (はくちょう座SS星) をチョイス。明るさの変動幅的にも SeeStar S50 との相性は良さそうで、運よくちょうどモニターを初めてからすぐに、以下のようにアウトバーストを検出できた。
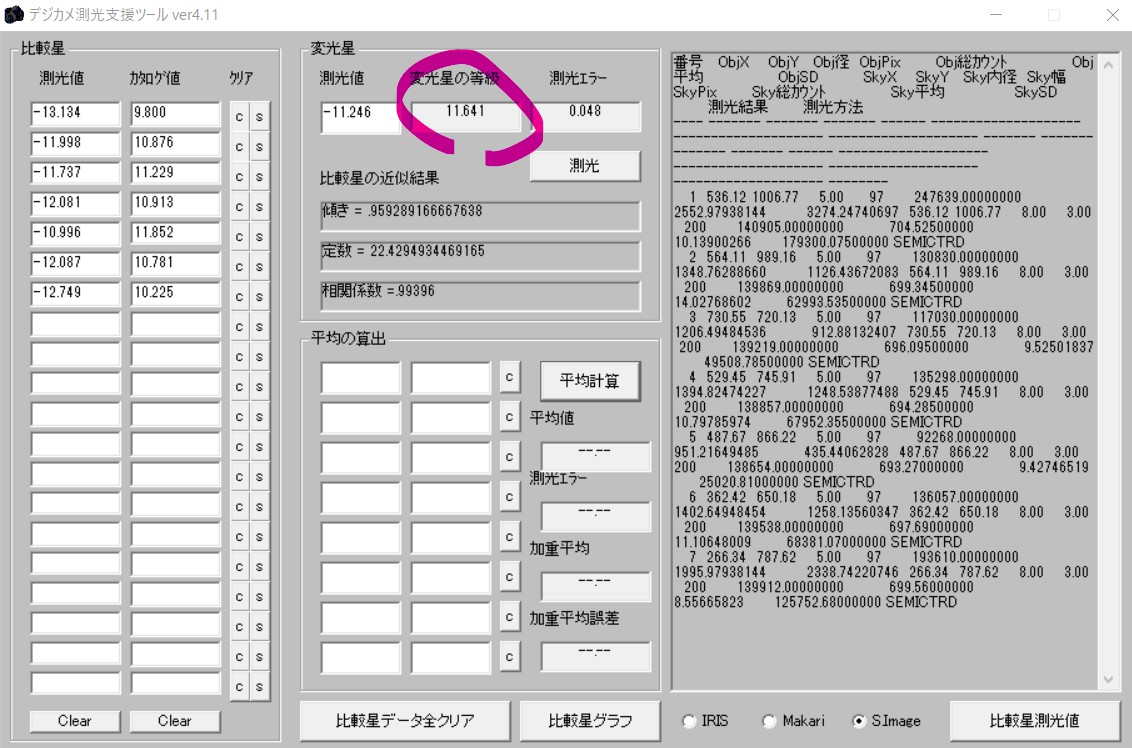
ここで、国内のデジカメ測光で主流になっている、”cG” 等級を求めてみることにした。この光度体系は VSOLJ 内で約10年は使用されており、デジカメのG画像について星表のV等級と比較して等級を求めた場合に用いられている。将来的にビギナー層への波及も想定し、計算には永井和男氏がデジカメ測光用に開発されたフリーソフト digphot4 を用いることにした1。このソフトは器械等級とカタログ等級から最小二乗法で1次の近似式を求め、その近似式を使って目的星の等級を算出している。以下に、9月12日における計算の様子(スクショ)を示す。その結果、12日の SS Cyg の明るさは約 11.64 等 (cG) という値が求められた。
同様に他の数日分の観測日についても測光したので、結果を併せてテーブルに示す。
| Date (UT) | mag (cG) | err |
| 2023/09/12.527 | 11.64 | 0.05 |
| 2023/09/13.506 | 11.76 | 0.05 |
| 2023/09/14.516 | 11.72 | 0.05 |
| 2023/09/25.556 | 8.71 | 0.02 |
| 2023/09/27.522 | 8.86 | 0.06 |
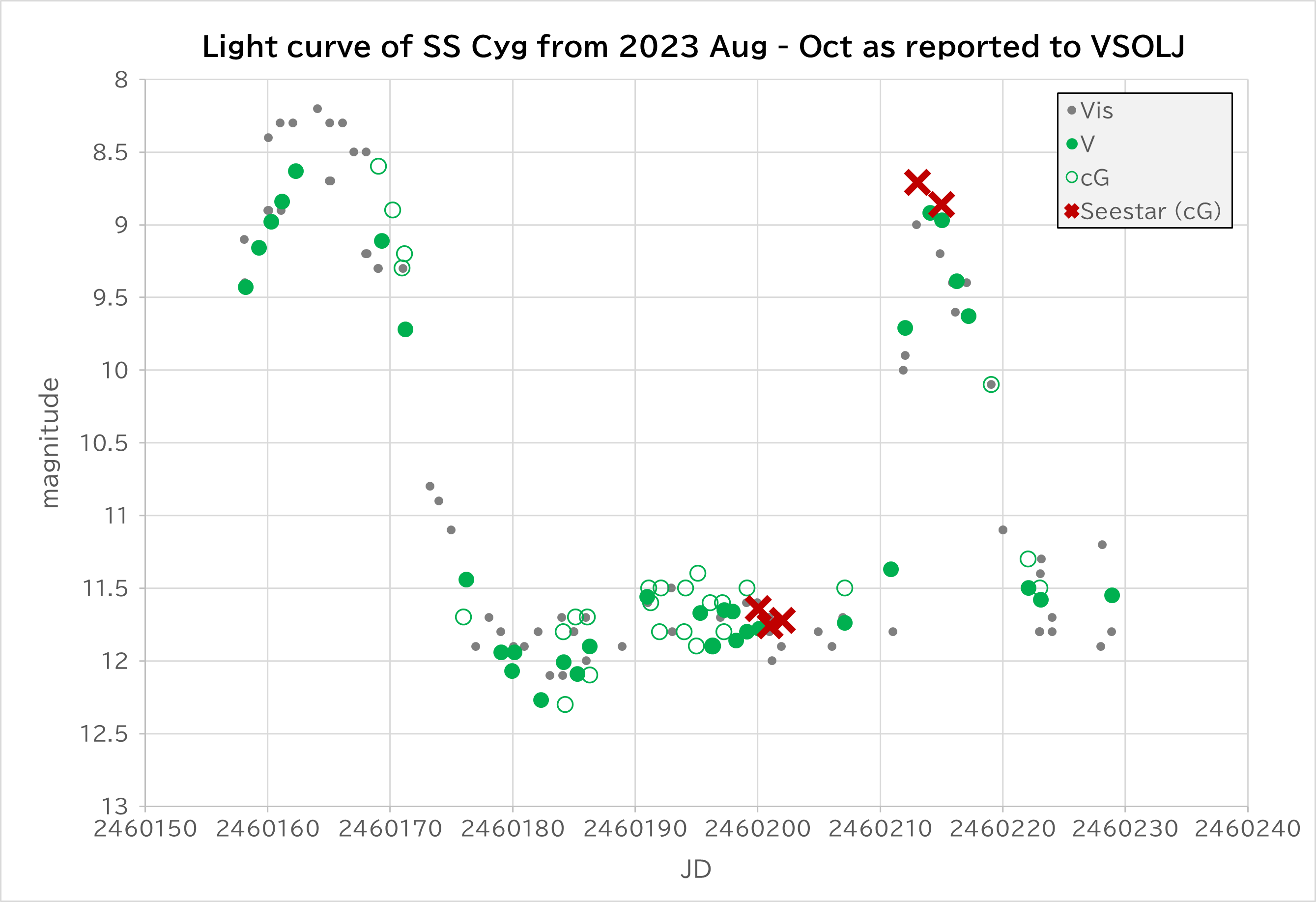
計5日間の測光の結果、cG 等級としては良好な結果を得ているように見える。ついでにVSOLJ に報告されている SS Cyg のデータと併せてライトカーブを作ってみた。ライトカーブに落とし込んでみても、SeeStar S50 のG画像を用いた測光結果 (cG) は、他の観測者と大きな差はなさそうである。
現段階のまとめ
- SeeStar S50 (カラーCMOS) で観測されたFITSデータについて、R, G, B 分解し、G画像について測光の検証を行った。
- 測光にはフリーソフトのマカリィ(国立天文台)を用いた。
- その結果、G画像の器械等級とUCAC4 のV等級の間に、線形性が確認できた。
- 現在の SeeStar S50 の仕様だと(露出時間が10秒固定なので)、およそ8~15等の星が測光可能と考えられる。
- SeeStr S50 で SS Cyg のモニター観測を数日間行い、アウトバーストが検出できた。
- デジカメ測光と同じ方法で、SS Cyg の cG 等級 (digphot4 / 製作者: 永井氏) を求めたところ、VSOLJ の報告データと大きく矛盾しない結果が得られた。
SeeStar S50の良き点(測光観測をする上で)
- 望遠鏡が軽くて、設置と撤収が非常に楽ちん(観測もすぐはじめられる)。
- 設置時は特に望遠鏡の向きや方位を気にしなくて良い。
- オートフォーカスがきく。
- バッテリー内臓なので、電源が不要。
- 約8万円(電視観望用のオールインワン望遠鏡としては破格)。
- スマホから無線 (WiFi) で制御するので、室内から観測できる。
- ZWO 社のプレートソルブ機能により、天体の自動導入で困ることがほぼ無い(初心者に超やさしいと思う)。※ただし、変光星などリストに無い天体の導入にはコツがいる。
気になる点
- 露出時間が10秒のみ(※その後アプリのアップデートで20秒、30秒が選択可)。
- Gain は本当にゼロなのか?2
- 12ビットのチップなのに、16ビットで記録されているのは何故?3
- 変光星などアプリのリストに無い天体は、アプリの星図とファインディングチャートなどを頼りに導入位置を見定め、プレートソルブするしかない。
- 経緯台なので、撮影された画像の南北がつかみづらい。(目的星の同定は、地平座標が表示できる星図ソフトと見比べると良き。)
- ライブスタック後の画像に記録されている時刻は撮影終了時刻となる。(測光を目的とする場合は、スタック前の画像を個々に保存する設定にして、1枚目の画像と最後の画像から露出中央時刻を算出する必要がある。)
- そもそも時刻は何と同期している?(スマホの時計?)
- [2024年2月8日追記] digphoto4 をWindowsで動かす場合、必ず “Visual Basic 5.0(SP3) ランタイム” を併せてインストールしてください。これを入れないとソフトが起動しません。 ↩︎
- 他の画像も調査したところ、2023年9月7日~14日の期間に撮影したデータは全て、Gain = 0 でした。このときアプリのVer. 1.6.0 又は 1.7.1 となる。一方で、9月25日、27日のデーは全て Gain = 80 で記録されていました。9月21日にアプリのアップデート(Ver. 1.8)があったので、これが原因でGain =0 から 80 で撮影されるようになったのか、あるいは元々 Gain = 80で撮ってたけど、FITSのヘッダーにちゃんと書き込んでいなかったのか。どっちかですね。なお星見屋さんの情報では、10月12日にアップデートされた Ver. 1.9 においてもGain = 80 で記録されているとのことです。(参考: アプリの更新履歴はDLサイトから見れる) ↩︎
- [2023年10月15日追記] この件について岡山の Mhh さんと O さんからコメントを頂戴しました。そもそも、FITS の BITPIX はルールとして 12 bit が記述できないようなのです(有効なBITPIX値: 8, 16, 32, 64, -32, -64 / 参考: FITS ユーザーズガイドより)。そのため、便宜上FITSのヘッダーは 16 bit で記述する必要があるのでしょう。ちなみに、ZWOのライブスタックという処理は加算平均だと思われるので(星見屋さんにも確認済)、それならば、飽和している星のカウント値は12ビット (カウント値4096) のまま頭打ちになるはずだ。ところが、先にも書いたとおり、飽和している星のカウント値は65536に達している。なお、数枚程度のスタック画像も、80枚近くスタックした画像も BITPIX は16となっており、ファイルサイズもほぼ同様だ。まだよくわからないが、12ビットを16ビットに(見かけ上)再スケールするような処理が働いているのかもしれない。 ↩︎
期待したいアップデート
星見屋さん曰く、将来的にアプリ側のアップデートで、”pro” モードなるものが追加されるかもしれないとのこと。それを見越して?、変光星の測光観測にもあったら嬉しい機能を以下に挙げてみた。
- 露出時間の変更オプションがあれば嬉しい。これが可能になれば、暗い星を測光する場合は多少なりとも S/N 向上が期待できる(ただし、経緯台式なので、視野回転のことを考えると、10秒より長い露光はあまり現実的ではない側面もあるだろう)。一方で、10秒より短い露出時間が使えれば、もう少し明るい星が測光できようになるなど、観測対象の幅が広がるはずである。
- 簡便に矢印とかでも良いので、画像の南北を表示できるオプションがあると嬉しい(プレートソルブを使っているので、アプリ側で南北の把握は容易なはず?)。
- 現状、星図ソフトにGCVS名(変光星名)をちらほら確認できるが、検索リストには入っていないので、GCVSを追加DLして検索できるオプションがあると嬉しい(観測効率が劇的にアップするはず)。
- 任意の天体(RA, Dec)をリストに追加できるオプションがあると嬉しい(新天体に対応しやすくなる)。さらに、RA, Dec を直接入力して導入する機能もあると嬉しい。
- 時刻の記録方法のオプションがあると嬉しい(例: 露出開始時刻、露出中央時刻、露出終了時刻の3パターンなど)。
- 変光星の測光ができるのであれば、掩蔽観測(恒星食)にも使えそうな気がする。動画の撮影機能やオプションが充実すれば、色々検証ができそうだ(例えば動画撮影時の露出制御、スマホのGPSを使った時刻の強制同期、映像内に1/1000秒までの時刻をスーパーインポーズ、avi での保存… etc.)。
さらに検証してみたいこと
- 透過型回折格子を使った R, G, B 画像の分光感度特性の測定(UV/IRカットフィルターが入った状態でどうなっているのか?)
- アプリが Ver. 1.8 になったことで、スタック前の画像をFITSで個々に保存できるようになっている。そこで、それらのファイルを使って連続測光観測を試してみたい。観測対象は短周期の食連星など。
- Ver. 1.8 のアップデートには、マニュアルフォーカス機能も備わったらしい。 現状、露出時間の変更ができないので、デフォーカスすることで、8等よりも明るい星の測光に使えないか検証してみたい。