スマート望遠鏡 Dwarf3
Dwarf3 測光観測 が行えるのか、いくらか検証を行ったので、現状の結果等をまとめておこうと思う。なお、本検証は例によって星見屋 日本変光星研究会 の所属として実施しています。また、依頼に伴う報酬の授受は一切ありません(検証には星見屋さんより送って頂いたデモ機を用いています)。ここに書く文章については、「測光」や「Seestar」のことを知っていないとわかりにくい書き方になっているので、予めご理解頂きたい。
Dwarf3 について 本機はいわゆるスマート望遠鏡の一種である(2024年7月よりクラファン開始、同年12月より一般販売開始)。天体撮影(電視観望)に必要な機器類をおおよそ内蔵し、スマホやタブレットを使って統括的な操作が行える。ライバルは何といっても ZWO 社の Seestar シリーズだろう。詳細なレビューは他の人にお譲りするが、特筆すべきはレンズが2眼 になっており、望遠側と広角側を使い分けて、天体撮影が行える点である。加えて赤道儀 (EQ) モード を初めから公式にサポートしている点も評価できる。さて、本機の望遠鏡としての基本スペックは以下の通りである(望遠側についてSeestar S50と比較):
項目 Dwarf3 (DWARFLAB ) Seestar S50 (ZWO ) 口径 35mm 50mm 口径比 F4.3 F5 焦点距離 150mm 250mm イメージセンサー IMX678 IMX462 センサーサイズ 1/1.8″ 1/2.8″ 解像度 3840×2160 1080×1920 ピクセルサイズ 2.0×2.0μm 2.9×2.9μm A/Dコンバーター 12bit 12bit 画角 約2.9°×1.6° 約0.7°×1.3°
※公式マニュアル ちなみに、広角側については口径3.4mm、焦点距離6.7mmという光学系で、IMX307 (1/2.8″, 1920×1080, 2.9μm) というセンサーが載っているようです。このスペックだと画角は約39°×25°と計算され、冬の大三角がぎりぎり入るくらいのイメージだと思われます。公式ページにはフルサイズ換算で広角側が45mm、望遠側が737mm相当と書いてありました。なお広角側については、ただのファインダーではなく、露出をかけて星座の写真を撮ることができる。しかもFITSで保存することもできるため、測光についても期待が膨らむところである。
あと、重要なのが内蔵フィルター だ。Dwarf3 には天体モードで撮影する場合、可視光フィルター、天文用フィルター、デュアルバンドパスフィルターの3つを選ぶことができる(下図参照)。デュアルバンドパスフィルターについては、Seestar のDuo-band (LP) フィルター(Hαと [OIII] 透過)と同等と考えて良さそうですが、Dwarf3 の可視光フィルターと天文用フィルターは長波長側の特性が異なっているようである。詳しくは星見屋さんのHP にグラフが公開されているので参考まで。なお測光観測では「天文用フィルター」で良いのではないかと思われる。
天体モード時に選択できる3種のフィルター.
FITSヘッダーについて まず本機は望遠側で撮った画像を FITS で保存することができる。Seestar と同じく、ライブスタック後の画像と、スタック前の個別画像が保存される。スタック後のFITSファイルについて、ヘッダー部を閲覧してみると、以下のようになっていた:
Dwarf3のスタック済 FITS ファイルのヘッダーをマカリィ で閲覧.
FITSヘッダーを見ると、Seestarに比べると情報量がやや少ない印象を受ける。例えば、スタック枚数、フィルター名、フォーカスポジション値 は Seestarにはあったが、Dwarf3には無い(一部、ファイル名から読み取れるが)。さらに RA, Decの記述はあるものの、WCS
ダークとフラットについて 測光観測を行う上で重要なのが、1次処理に用いるべきダークやフラットの存在だ。Dwarf3 は出荷時にダークとフラットを内部ストレージ に持っている(PCと接続すれば、このダークとフラットのFITSファイルも確認できる。公式マニュアル 8℃以上の差 がある場合はアラートが出るようです。
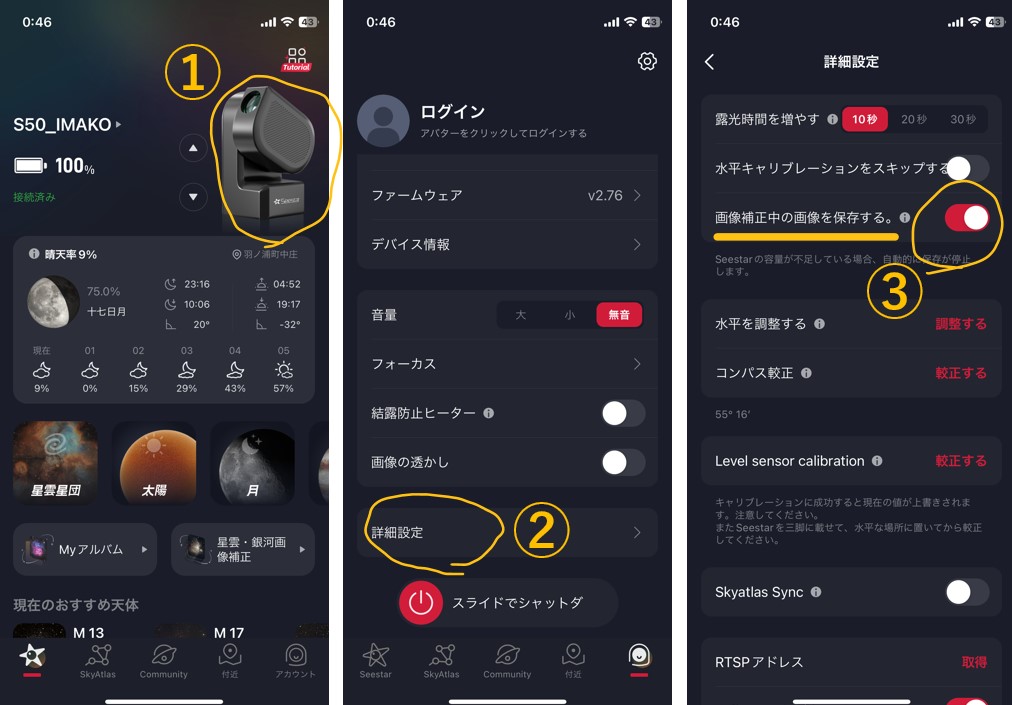
Dwarf3 はSeestarと違って、露出時間の設定が細かくいじれ、さらにゲインの数値も任意で変えられます (Seestarはゲイン固定、露出時間も10秒、20秒、30秒しか選べません)。ゆえに、露出時間とゲインを頻繁に変えると、撮影のたびにダークを用意したり、事前に似た「温度」になることも考慮して準備しておく必要があります。撮影設定(露光時間&ゲイン)については、プリセットとして4パターン用意されているので、基本はそれを使うことにして、ダークもプリセットに合せて用意しておくと良いのかもしれません(あと、中級者以上向けの設定として、望遠側の撮影には 2×2 のビニングをかけられる項目もある。この場合もダークやフラットの用意は、同じ設定になるように注意せねばならない)。
天体モードで撮影するさいの露出時間やゲインに関する設定画面. プリセットは4種類ある(上記のスクショからは一つ消えているが、実際にはアプリを横スクロールすると表示される)。
「望遠ビニング」という項目で、4k = 1×1、2k = 2×2 というビニングが選べる.
このような自由度は、少々初心者には難しい&煩わしく感じるかもしれませんが、逆に言えば露光時間やゲインが細かく設定できる点は、痒い所に手が届く仕様とも言えます。とはいえ、Dwarf3 のダーク撮影は物理的に(スマート望遠鏡だからこそ)面倒臭いと感じる点もあります(あくまで個人の感想)。実はSeestarはダーク撮影用の遮蔽板が内蔵されていますが、Dwarf3 には無いのです。そのため、公式マニュアル
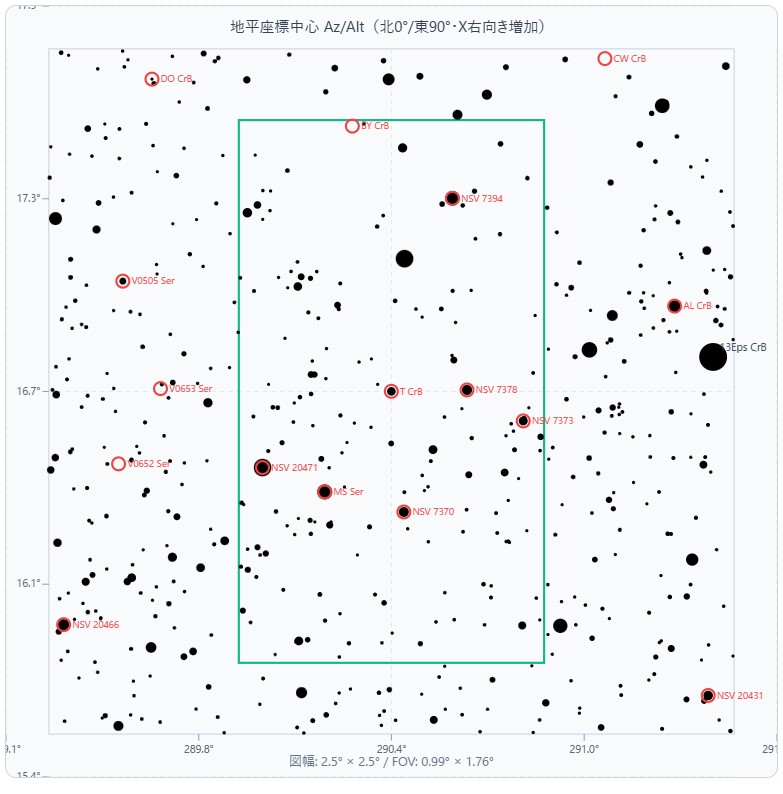
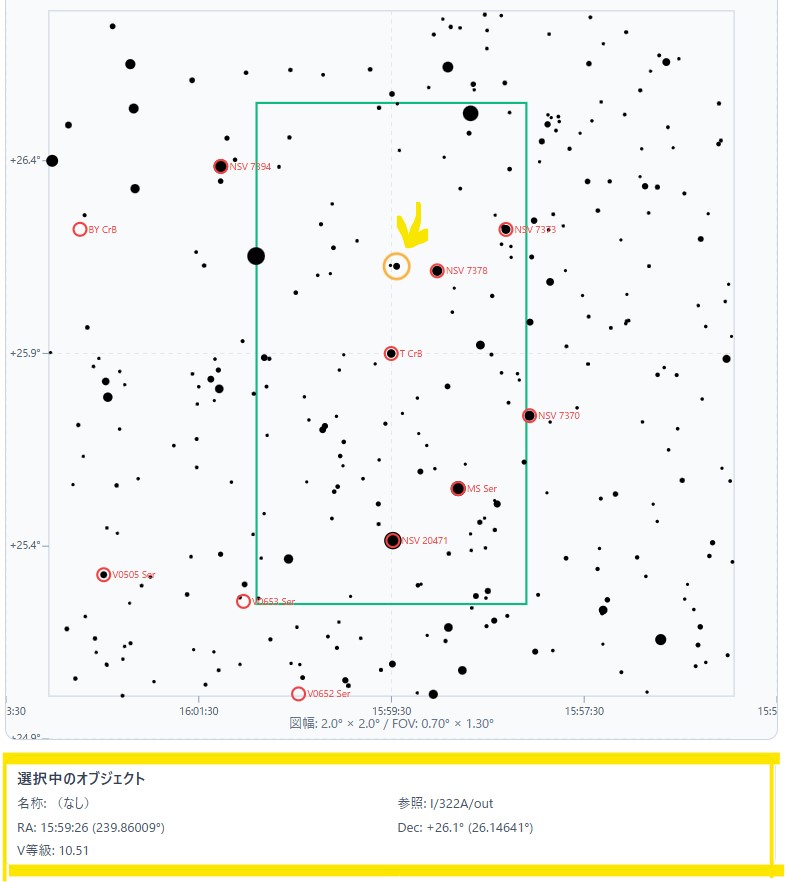
望遠側の測光テスト 差し当たり、Seestar S50 で行った検証 と同じようなことをやってみることに(このとき、アプリ Ver. 3.1.2B80、ファームウェアV1.3.0 )。まずは T CrB の撮影を行ったので、その FITS 画像を使って検証を進めてみた。
Dwarf3 (望遠側)で撮影した T CrB 領域の画像。10秒露光、Gain 60、1×1ビニング、11枚スタック。2025年3月10日1時頃(JST)撮影。 将来的な教育・普及用途も考慮して、測光の検証にはマカリィ
Dwarf3 のGプレーン測光値(器械等級) vs V等級 (UCAC4)。破線は回帰直線では無くただの対角線。
Dwarf3 のGプレーン測光値(器械等級)とV等級の間には一定の線形性が確認でき、Seestar S50 と同じような傾向を持つことがわかる。これは、Dwarf3 のチップ IMX678と、Seestar S50 のチップ IMX462 の分光感度特性 (G の透過波長) が似ていることに起因しているものと考えられる(分光感度特性はググると、それぞれグラフが見つかる)。
なお今回の撮影設定(10秒露光、ゲイン60、1×1ビニング、11枚スタック)では、明るい星は約7.5等で飽和が認められた。逆に暗い星は約13.5等くらいまでなら測光でき、それ以上暗い星の測光は今回難しかった(テスト観測時、西の空に月光あり)。どうせなら、14等くらいまで写って欲しいところなので、暗い星については、空の条件、露出時間をのばす、EQモードで撮る、2×2ビニングする等、まだ色々試す余地はありそうです。
さて、線形性も確認できたので、そのまま調子に乗って T CrB の明るさを簡便に算出してみました (やり方や比較星はキャンペーン と同様)。
マカリィで T CrBと比較星を測光している様子.
すると、約9.93±0.09等 という数字が出てきました。一応、T CrBの監視キャンペーンの報告値 と比較してみると、同日の明るさは平均約9.9等 だったので、大きな矛盾は無さそうでした。キャンペーンで Dwarf3 の測光結果を広く受付けるか、そこはまだ時期尚早なのですが(やるならマニュアル整備等の準備も必須)、もう少し色々と試して、外堀を埋めていきたいと思っています(EQモードでの連続測光や、広角側の測光も検証したい)。
時刻について ところで、Dwarf3 の「時刻」はどのように記録されるのでしょうか。FITSヘッダーなどを調べてみました。まずスタック済みのファイルを見てみると、
FITSヘッダー時刻: 2025-03-10 01:01:52
となっていました。次に、スタック前の個々のファイルを見てみると、1番最初に撮られたデータは、
FITSヘッダー時刻: 2025-03-10 00:59:35
となっています。それでは、最後にスタックされたファイルはどうかというと、
FITSヘッダー時刻: 2025-03-10 01:01:35
となっています。う~む、なんだかスタック済みの時刻保持が怪しい気がします。少なくとも、スタック前の個々のファイルの時刻については(ファイルプロパティの生成時刻と1~2秒しか変わらないので)恐らく、露出終了時刻でしょう。しかしスタック済みのファイルについては、最終フレームの時刻から17秒後の時刻になっています。ライブスタックされたFITS画像を保存するのに、それくらいの時間が必要なのでしょうか?あと、スタック済みのファイルには以下のようなファイル名がついています:
stacked-16_HD 143454_10s60_Astro_20250310-005926 302.fits
このうち、太字にした部分は、日時のはずで、時刻は0時59分26.302秒と読めます。あれ?なんだこれ。恐らくこれは、スタック1枚目の画像のFITSヘッダー時刻の約10秒前の数字と思われます(つまり1枚目の露出開始時刻?)。とりあえずスタック済みファイルの露出中央時刻については(スタック前のファイルより)、頑張って自分で計算できそうですが、このあたりは初心者には難しい・面倒くさいと感じるところではないかと思います。そもそも、時刻の取り扱いが少々雑な印象を受けますので、科学的な「観測」に使うためには、このあたりの改善(アップデート)が望まれるところでしょうか。
現状のまとめ
ここまでの内容を以下の通り、箇条書きでまとめておく:
Dwarf3 は Seestarよりも細かい撮影設定が可能。
測光で使うにはダーク等(1次処理)に関する適切な知識が必要。
Gプレーンの測光については Seestar S50 と概ね同様の結果。
現状、観測時刻の取り扱いに注意が必要。
今後はEQモードを用いた測光、広角側の測光などを検証予定。
以上、また何か Dwarf3 の測光観測で進展があれば、続編を書きたいと思います!では。
■関連記事 「SeeStar S50 を使った測光観測の検証 」SeeStar S50 を使った食変光星の測光観測 」デフォーカスを用いた明るい星の測光 (Seestar S50) 」Seestar S50 で天体スペクトルを撮る 」かんむり座T星の監視・観測キャンペーン開始 」■発表資料 Seestar S50を用いた反復新星T CrBの観測キャンペーン 」(発表スライド; PDF )Seestar S50を用いた測光観測の検証と普及 」(発表スライド; PDF )Seestar S50 を使った測光観測の検証と展望について 」(発表スライド; PDF )